موتورهای براشلس ظاهراً همه جا هستند - لوازم خانگی، وسایل نقلیه، ابزارها و موارد دیگر. اما موتور براشلس چیست و چه چیزی آن را با موتور برس دار متفاوت می کند؟
موتور براشلس به معنای همان موتور BLDC است. شکل کامل موتور BLDC موتور جریان مستقیم بدون جاروبک است.
در این مقاله به تمام سوالات اساسی مربوط به این نوع موتور همه کاره پاسخ خواهیم داد.
موتور براشلس چیست؟
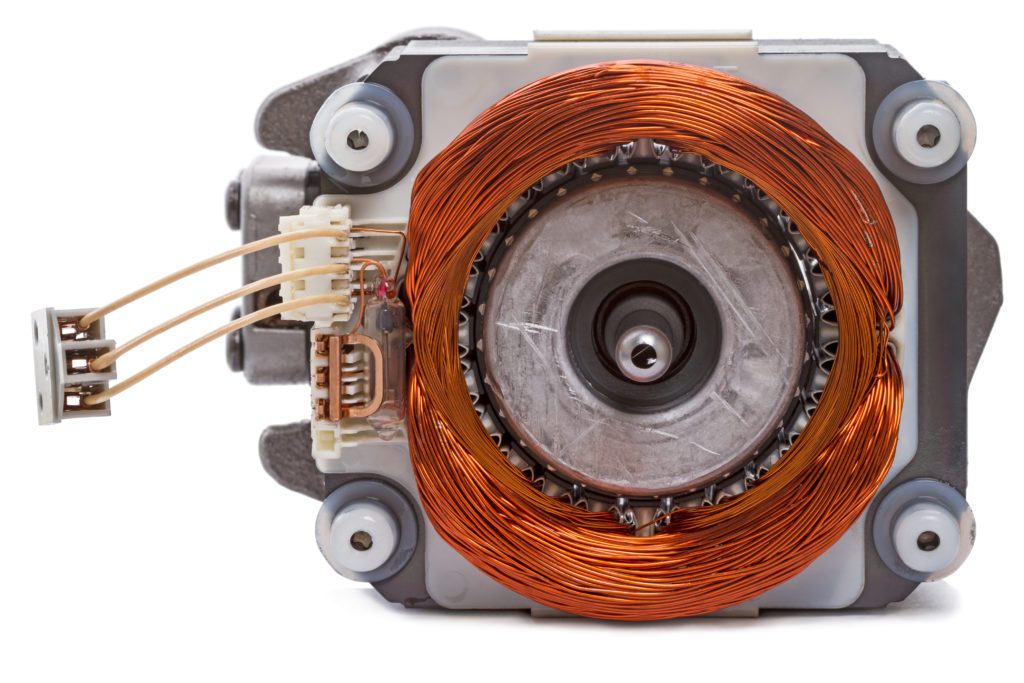
موتور DC بدون جاروبک (BLDC) نوعی موتور الکتریکی است که برای چرخش خود به نیروهای دافعه و جاذبه بین آهنرباهای دائمی و آهنرباهای الکتریکی متکی است. BLDC مخفف "جریان مستقیم بدون جاروبک" است که تقریباً نحوه عملکرد موتور را توصیف می کند.
چرخش موتور توسط کنترلکنندهای مدیریت میشود که فورانهای زمانبندیشده جریان را به آهنرباهای الکتروموتور میرساند که به نوبه خود سرعت آن را کنترل میکند.

در شکل 1، آهنرباهای دائمی روی روتور را به رنگ قرمز و آبی و سیم پیچ های الکترومغناطیسی روی استاتور را به رنگ مسی مشاهده می کنید.
موتورهای براشلس به دلیل راندمان بالا و عمر طولانی در مقایسه با موتورهای جایگزین شناخته می شوند. چندین روش متداول برای توصیف این نوع موتور وجود دارد، از جمله موتورهای براشلس، موتورهای DC بدون جاروبک و موتورهای BLDC.








تاریخچه موتورهای براشلس
موتورهای DC بدون جاروبک در سال 1962 توسط T.G اختراع شدند. ویلسون و پی.اچ. Trickey در مقاله AIEE خود با عنوان "ماشین D-c با کموتاسیون حالت جامد" ارائه شده است.
آنها از طریق این مقاله مشکلاتی را که میخواستند حل کنند و راهحلهایی را که به آن دست یافتند، بیان میکنند. در بخش خود در مورد ملاحظات اساسی، آنها چالشهای طراحی را که باید برای ساخت یک موتور براشلس عملکردی بر آنها غلبه کنند، بیان میکنند:
از آنجایی که سوئیچینگ مورد نیاز رساناهای آرمیچر باید با عناصر استاتیک انجام شود، مطلوب است که خود عناصر کلید زنی نچرخند. این ممکن است با قرار دادن سیم پیچ آرمیچر روی عضو ثابت و چرخش قطب های میدان انجام شود. استفاده از آهنربای دائمی برای عنصر میدان، نیاز به تامین توان روتور را از طریق برس یا عمل ترانسفورماتور بی نیاز میکند. دقیقا با همان سرعت روتور. برای این منظور، اطلاعات مربوط به موقعیت زاویه ای قطب های روتور باید به طور مداوم به استاتور مخابره شود تا دقیقاً سوئیچینگ درست هادی های آرمیچر انجام شود.
اختراع موتور براشلس
در پاراگراف پایانی خود، آنها برخی از راههایی را که پیشبینی میکنند اختراعشان مزیتی نسبت به موتورهای برسدار ایجاد میکند، بیان میکنند. بهبودهایی که آنها پیشنهاد کردند بسیار دقیق بوده است:
عملاً باید تداخل رادیویی را به معنای عادی و همچنین فرسودگی و نگهداری را که اکنون در برسها و کموتاتورها با آن مواجه میشویم از بین ببرد. دستگاه باید دارای قابلیت اطمینان بسیار بالا و همچنین عمر طولانی باشد.
همتای اصلی موتورهای بدون جاروبک، موتور برس، بیش از 100 سال قبل از آن در سال 1856 اختراع شد. هنگامی که جریانی به سیم پیچ استاتور می رسد، به یک آهنربای الکتریکی تبدیل می شود و قطب شمال و جنوب ایجاد می کند. وقتی قطبیت الکترومغناطیس با آهنربای دائمی که روبروی آن است مطابقت دارد، قطب های مشابه آنها دفع می شود و روتور می چرخد.
اگر جریان این پیکربندی را حفظ میکرد، روتور برای مدت کوتاهی میچرخید، سپس هنگامی که آهنربایهای الکترومغناطیس و آهنرباهای دائمی مقابل یکدیگر قرار میگرفتند، متوقف میشد. به همین دلیل، جریان به صورت یک سیگنال سه فاز به گونه ای ارسال می شود که به طور مداوم قطبیت آهنرباهای الکتریکی را تغییر می دهد تا روتور به چرخش ادامه دهد.
موتور با سرعتی برابر با فرکانس سیگنال سه فاز می چرخد، بنابراین اگر می خواهید موتور سریعتر حرکت کند، فرکانس سیگنال را افزایش می دهید. با یک وسیله نقلیه کنترل از راه دور، سرعت با افزایش دریچه گاز افزایش می یابد که به کنترل کننده می گوید فرکانس سوئیچینگ را افزایش دهد.
برای اینکه بدانیم چگونه و چه زمانی باید سیمپیچها را انرژی دهیم، موتور براشلس از حسگرهای هال افکت برای تعیین موقعیت نسبی روتور و استاتور استفاده میکند. به این ترتیب، الکترومغناطیس های موجود در استاتور به ترتیب درست در زمان مناسب فعال می شوند و موتور به حرکت خود ادامه می دهد.

نمودار موتور براشلس
مکانیسم موتور براشلس به راحتی با یک نمودار / GIF نشان داده می شود که در زیر می توانید مشاهده کنید.
موتورهای براشلس ممکن است اینرانر یا پیشران باشند. موردی که در نمودار بالا مشاهده میشود، پیشیتر است، زیرا روتور آن حاوی آهنرباهای دائمی در خارج از استاتور قرار دارد. هر آهنربای دائمی "قطب" نیز نامیده می شود و تعداد قطب های موتور می تواند بر عملکرد آن تأثیر بگذارد.
آهنرباهای دائمی توسط الکترومغناطیس ها دفع می شوند و روتور را به صورت دایره ای به اطراف هل می دهند در حالی که استاتور ثابت می ماند، در این مورد در خلاف جهت عقربه های ساعت.
کنترل کننده موتور در سمت راست که همان کنترل کننده سرعت الکترونیکی (ESC) است، از یک طرف به منبع تغذیه یا باتری و از طرف دیگر به موتور متصل می شود. می توان آن را مستقیماً به دستگاه ورودی دریچه گاز یا از راه دور مانند سیگنال رادیویی متصل کرد. ESC فرکانس سیگنال دریچه گاز را از کنترلر می گیرد و با تنظیم فرکانس سوئیچینگ موتور به سرعت چرخش موتور می گوید.
کاهش مصرف انرژی با خازن های بهنیکو
در پایان این مقاله تخصصی درباره موتورهای براشلس، اگر در صنعت خود با موتورهای الکتریکی، تجهیزات صنعتی یا سیستمهای تهویه و پمپها سروکار دارید، زمان آن رسیده که به کاهش مصرف برق و افزایش راندمان انرژی فکر کنید.
💡 راهکار چیست؟ استفاده از بانکهای خازنی با کیفیت بالا!
شرکت بهنیکو با ارائه خازنهای ستارهای پیشرفته، به شما کمک میکند تا نهتنها مصرف انرژی را به طور چشمگیری کاهش دهید، بلکه طول عمر تجهیزات برقیتان را نیز افزایش دهید.
✅ نصب آسان
✅ کاهش چشمگیر هزینه برق
✅ عملکرد پایدار و قابل اعتماد در سیستمهای صنعتی
🔌 همین حالا با بهنیکو تماس بگیرید و اولین قدم را به سوی بهینهسازی مصرف انرژی بردارید!